NASA Projects
In-situ robotic exploration is an important tool for advancing knowledge of the geological processes that describe the Earth and other Planetary bodies as well as better inform possible future colonization of these far-off lands. To this end, I work on three NASA-funded, multi-university, multi-displinary teams/projects moving toward more robust, valuable, and autonomous robotic missions on the Moon, Mars, and beyond.
LASSIE: Legged Autonomous Surface Science In Analogue Environments (PSTAR)
This project’s goal is to evaluate and estimate geotechnical properties of different types of terrain in planetary analogue environments by integrating capable legged robots with proprioceptive force sensing capabilities and cognitive human decision models toward reactive, semi-autonomous, scientific operation in more challenging and varied environments. In particular, we took a team of robots and scientists to Mt. Hood, Oregon and White Sands, New Mexico to create a multi-modal, co-located data set of geological measurements from traditional sensors, satellite and drone imaging, and a collection of mono and quadrupedal legged robots.
LASSIE-M (MEP)
LASSIE-M accelerates some of the LASSIE goals, focusing on “[enabling] science-driven autonomous exploration of Mars by using high-mobility terrain sensing legged robots, cognitive human decision models, and integrated science and sensing payloads” (emphasis mine).
TRUSSES: Temporarily, Robots Unite to Surmount Sandy Entrapments, then Separate (LUSTR)
This project explores building a heterogeneous team of robots to jointly traverse and explore difficult and risky terrain. Using turret-mounted, extensible, spiral-zipper arms, the robots can come together, connecting to move as a unit to help each other escape sand traps or multiply their pulling force.
Working with these incredibly talented teams of geologists, planetary scientists, psychologists, robotics controls and planning engineers, I joined the LASSIE and TRUSSES teams when I entered my Postdoc.
Proprioceptive Estimation of Terramechanics
Working with geomechanists and planetary scientists, we leverage the force measuring capability of the robot legs to measure terramechanical properties of the substrate with each step. We are able to detect the penetration resistance, crusty surfaces, and shear resistance, with aims to measure cohesion and moisture/ice content.
More Details Coming….
Terrain Stiffness and Risk Traversal Mapping
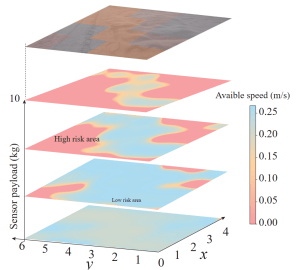
Using the proprioceptive capabilities of back-drivable robot legs, we are able to measure the terrain stiffness with every step. Using this measurements we can make terrain maps that can be used for geological discovery and/or combined with slipping/spin-out estimators to provide actionable risk traversal maps.
